位于意大利巴勒莫的国家研究委员会(IBF-CNR)生物物理研究所的HBP研究人员模仿了大脑海马体的神经元结构和连接,开发了一个机器人平台,该平
位于意大利巴勒莫的国家研究委员会(IBF-CNR)生物物理研究所的HBP研究人员模仿了大脑海马体的神经元结构和连接,开发了一个机器人平台,该平台能够像人类一样学习,同时机器人在周围导航空间。
模拟海马体能够在移动类似汽车的虚拟机器人时改变自身的突触连接。至关重要的是,这意味着它只需要导航到特定目的地一次就可以记住路径。与当前依赖深度学习的自主导航方法相比,这是一个显着改进,而后者必须计算数千条可能的路径。
“还有其他导航系统可以模拟海马体的作用,海马体充当大脑的工作记忆。然而,这是我们第一次不仅能够模仿海马体的作用,还能模仿海马体的结构,直至单个神经元及其连接,”IBF-CNR的MicheleMigliore和SimoneCoppolino解释说,他们在《神经网络》杂志上发表了他们的发现。
“我们使用它的基本构建块和文献中已知的特征来构建它——例如为物体、特定连接和突触可塑性编码的神经元。”从生物学中汲取灵感,研究人员能够使用与深度学习驱动平台不同的导航规则集。
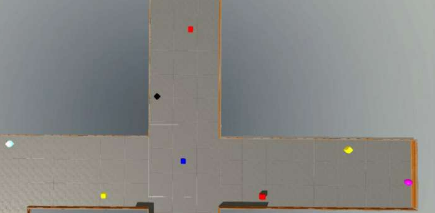
图片来源:人脑计划
为了到达指定的目的地,深度学习系统计算地图上的可能路径并为它们分配成本,最终选择最便宜的路径。它有效地基于反复试验并需要大量计算:数十年的研究一直致力于减少系统的工作量。
研究人员解释说:“相反,我们的系统将其计算基于它可以通过相机主动看到的内容。”“在T形走廊中导航时,它会检查关键地标(在本例中为彩色立方体)的相对位置。它一开始随机移动,但一旦它能够到达目的地,它就会重建一个重新排列神经元的地图进入它的模拟海马体并将它们分配给地标。它只需要经过一次训练就能记住如何到达目的地。”
这更类似于人类和动物的移动方式——当你参观博物馆时,你首先在这个地方四处游荡,不知道自己的路,但如果你需要返回到一个特定的展览,你会立即记住所有需要的步骤。机器人平台和海马体模拟都首先通过数字研究基础设施EBRAINS实现,然后允许研究人员在真实走廊中构建和测试物理机器人。
“物体识别基于机器人摄像头的视觉输入,但理论上可以根据声音、气味或运动进行校准:重要的部分是受生物学启发的导航规则集,可以轻松适应多种环境和输入”
Migliore实验室的另一名成员GiuseppeGiacopelli目前正致力于通过编码识别特定形状来制作适合工业用途的系统。“在仓库工作的机器人可以自我校准,并能够在短短几个小时内记住货架的位置,”Migliore说。“另一种可能性是帮助视障人士,记住家庭环境并充当机器导盲犬。”
声明本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们